电机原理及常用控制方法-电机原理及运行

电机数学模型
一、频率归算:
保持整个系统的电磁性能不变,把一种频率的参数及有关物理量折算成另一种频率的参数及物理量。即用一
个具有定子频率而等值于转子的电路去代替实际的转子电路。这必须保证:
1).转子磁动势F2不变(同转速,同幅值,同空间相位角)。
2).等值的转子电路的电磁性能(有功功率,无功功率,铜耗等)必须与实际转子一样。
分析:
f1=f2,表明用静止的转子代替实际的转子。
1).对 :转速不受影响;
幅值和空间相位角:只要用 代替 就能保证幅值和空间相位角不变。

2).电磁性能:用 代替 后,相当于在转子电路中串入了一个附加电阻 ,它会产生损耗,而实际转子电路
并不存在这部分损耗,据能量守恒,这部分功率表示转子获得的总的机械功率。
二、绕组归算:
定转子间,E1不等于E2,无等电位点,用一个相数、每相串联总匝数及绕组系数均与定子一样的绕组电路代
替经频率归算后的静止转子电路,且保证归算前后转子对定子的电磁效应不变,即转子磁势,转子总视在功率,
转子铜耗及转子漏磁场储能均不变。
1.转子磁动势不变:
2.转子总视在功率不变:
3.转子铜耗和漏磁场储能不变:
可得基本方程式为:

三、T型等值电路、相量图为:
用T型等值电路分析感应机几种典型运行情况:

空载运行;额定负载运行;起动运行;发电运行;电磁制动运行。
感应电动机的相量图:感应电动机的功率因数永远滞后。定子电流滞后电源电压。
1. 恒VF控制
恒VF控制利用异步电机静态相电压公式控制:

通过上式可知,只要使得U/ f恒定,则 ψm\psi_{m} 就近似不变,如果电机在不同转速下能达到额定电流,则转矩基本随磁通变化,所以基频以下转矩基本恒定,属于恒转矩调速;基频以上电压一定,属于恒功率调速。
2. 转差控制

前提是:电机稳定运行时,转差S很小,使得 R2′R_{2}^{} >> ωSLr2′\omega_{S}L_{r2^{}} 。这时异步电机的转矩近似正比于转差频率 ωS\omega_{S} ,控制转差频率 ωS\omega_{S} ,就能达到间接控制转矩的目的。
V/F控制、转差频率控制的基础是电机的稳态公式,在动态过程中 ψm\psi_{m} 不恒定,从而影响系统的动态性能;而矢量控制系统是利用电机进行控制,因而其性能动态性能比较好。
3. 电机控制常用公式
a.定子电压方程(d,q坐标)

b. 定子磁链方程

其中, ψf\psi_{f} 为转子磁链。
C. 从上面2个方程推导得到:


D. 电磁转矩方程:

E. 转子运动方程:

其中Te是电磁转矩;TL是负载转矩;J是转动惯量;Pn是极对数。
矢量控制(转子磁链定向)












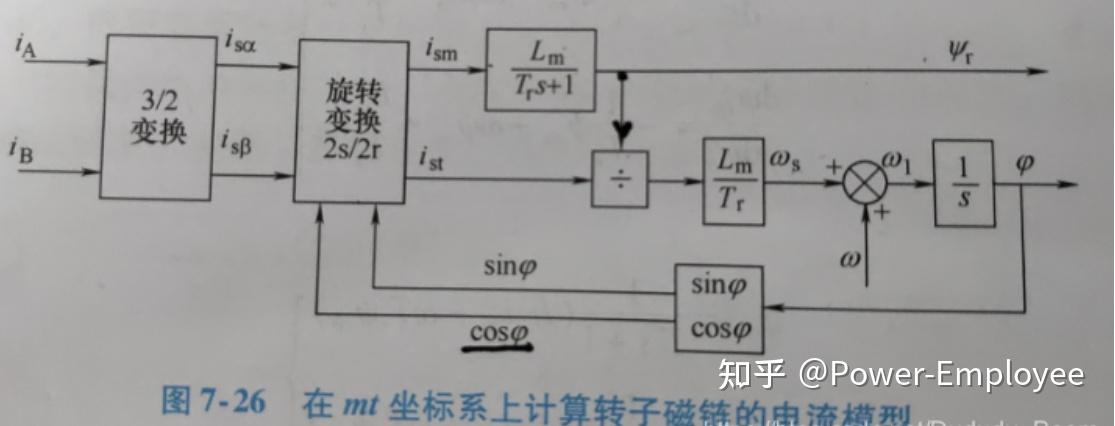
其中, \omega_{s} 转差, \omega 同步转速, \omega_{1} 为转子速度

